
NEWS
最新消息
2021.05.20
RIEGL Waveform-LiDAR技术和产品的推进
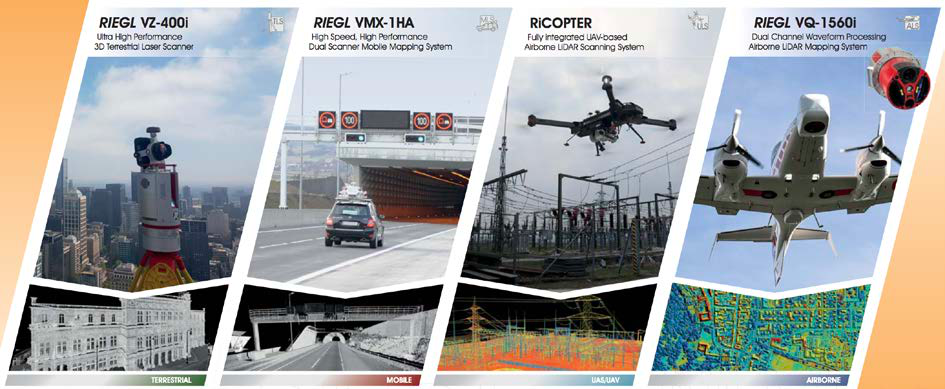
RIEGL光达产品线涵盖地面、移动、UAV以及空载雷射扫描的广泛应用。 RIEGL所有光达引擎和系统均基于RIEGL的Waveform-LiDAR技术,而与市场上其他光达产品有所区别、独树一帜。
RIEGL Waveform-LiDAR仪器和系统的主要应用领域。
不断提高的量测速度带来了挑战:尤其是在空载光达系统测距较长的情况下,回波讯号会在下一个激光脉冲发出后, 经过一段时间才到达。因此,多个激光脉冲同时发射时,必须应用特殊技术来解决由这种多周期回波(multiple-time-around ,MTA)效应造成的未定值(Ambiguities)。再者, RIEGL的Waveform-LiDAR对所有回波讯号进行连续数字化,可以基于软件自动解算这些雷射测距的未定值,这也得益于Waveform-LiDAR校准过的振幅讯息。未定值的自动解算极大地简化了空载和无人机载光达扫描的飞行计划,因为测区目标不必全部位于一个MTA区域中。MTA功能也使得地面光达能采集密集点云数据,尽管地面的目标可能会占据整个测距。
在空载光达测量中,速度至关重要。借助最近推出的 RIEGL VQ-1560i,这是一个双光达引擎Waveform-LiDAR系统,其脉冲频率是2000 kHz,以每平方米8点的密度,扫描面积覆盖率可达每小时450平方公里。同时,该系统仍具有所有优势,例如出色的树叶间隙穿透力(请参考下图),宽动态范围,可在一次扫描中测量具有大,小激光雷达横截面的目标,并具有很高的精度和准确性。该系统还提供双波长版本 RIEGL VQ-1560i-DW,它使用了波长1064 nm的近红外和532 nm的绿光雷射。

所有RIEGL光达仪器皆提供的基于波形之反射率估计值,可以提高RIEGL地面光达数据自动拼接的性能和可靠性, 目前已使用于RIEGL VZ-400i,该项新功能可直接在仪器本身上运行, 于扫描现场进行站点拼接。
由于反射率估计值会产生目标本身无关距离的属性, 如不同物体对雷射波长的反射率, 来自不同位置和方向的扫描数据的相似性被有效地用于拼接。搭配集成的GNSS接收器,可以立即对扫描数据进行高精度地理地位(请参见下图)。
RIEGL Waveform-LiDAR仪器和系统的主要应用领域。
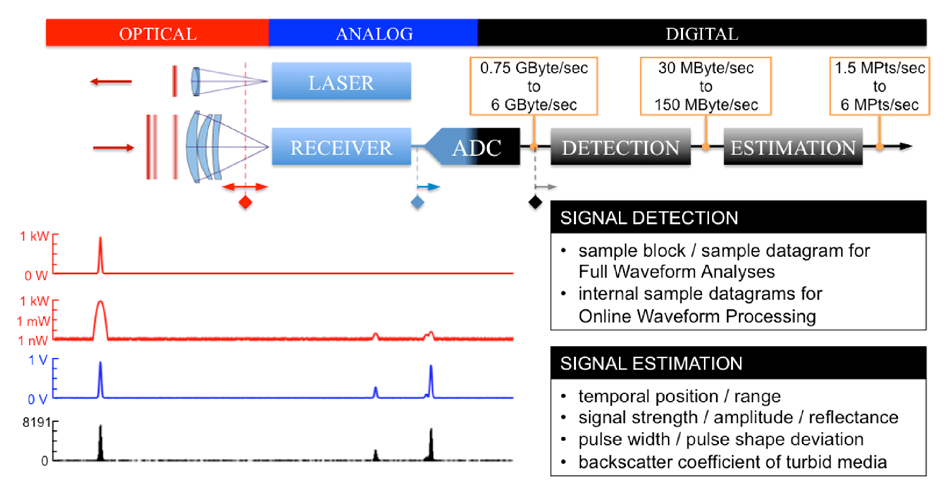
Waveform-LiDAR具有两个主要功能:首先,脉冲飞行时间(TOF)光达的返回讯号(从光学状态转换为电状态之后)由具有高采样率的模拟数字转换器(ADC)进行数字化,同时涵盖广泛的动态范围。其次,对数字化的回波讯号进行详细分析(讯号侦测和讯号估计),在线或脱机,提供特征丰富的测距结果,包含目标的精确距离,讯号强度和从接收到的回波讯号的实际波形得到的特性。结合角度测量并集成GNSS/IMU系统的移动式光达应用,所生成的3D点云不仅具有几何形状,而且还具备已校准的振幅和反射率估计值之类的属性,这些属性简化了诸如对位、地理定位、和过滤的进阶处理程序。
RIEGL Waveform-LiDAR仪器的测距仪之部分的系统方块图和讯号。
自从 RIEGL 于2004年在空载光达领域推出Waveform-LiDAR RIEGL LMS Q560以来,该设备以100 kHz的脉冲频率(PRR, Pulse Repetition Rate) 运行,多年来,测量速度一直在增长。最初,Waveform-LiDAR系基于记录波形并在所谓的全波形分析中脱机分析这些波形。在2008年 RIEGL 推出了第一款用于地面雷射扫描(TLS)领域的Waveform-LiDAR,即 RIEGL VZ-400,它具有实时波形处理功能,量测速度高达300 kHz。同时,在地面雷射扫描仪,脉冲频率已提高到1200 kHz脉冲频率,空载光达的扫描脉冲频率也已提高到4000 kHz。 不断提高的量测速度带来了挑战:尤其是在空载光达系统测距较长的情况下,回波讯号会在下一个激光脉冲发出后, 经过一段时间才到达。因此,多个激光脉冲同时发射时,必须应用特殊技术来解决由这种多周期回波(multiple-time-around ,MTA)效应造成的未定值(Ambiguities)。再者, RIEGL的Waveform-LiDAR对所有回波讯号进行连续数字化,可以基于软件自动解算这些雷射测距的未定值,这也得益于Waveform-LiDAR校准过的振幅讯息。未定值的自动解算极大地简化了空载和无人机载光达扫描的飞行计划,因为测区目标不必全部位于一个MTA区域中。MTA功能也使得地面光达能采集密集点云数据,尽管地面的目标可能会占据整个测距。
在空载光达测量中,速度至关重要。借助最近推出的 RIEGL VQ-1560i,这是一个双光达引擎Waveform-LiDAR系统,其脉冲频率是2000 kHz,以每平方米8点的密度,扫描面积覆盖率可达每小时450平方公里。同时,该系统仍具有所有优势,例如出色的树叶间隙穿透力(请参考下图),宽动态范围,可在一次扫描中测量具有大,小激光雷达横截面的目标,并具有很高的精度和准确性。该系统还提供双波长版本 RIEGL VQ-1560i-DW,它使用了波长1064 nm的近红外和532 nm的绿光雷射。
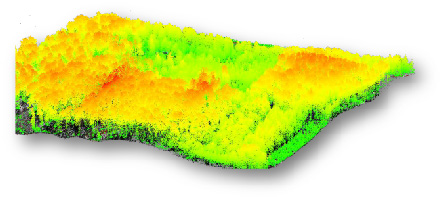
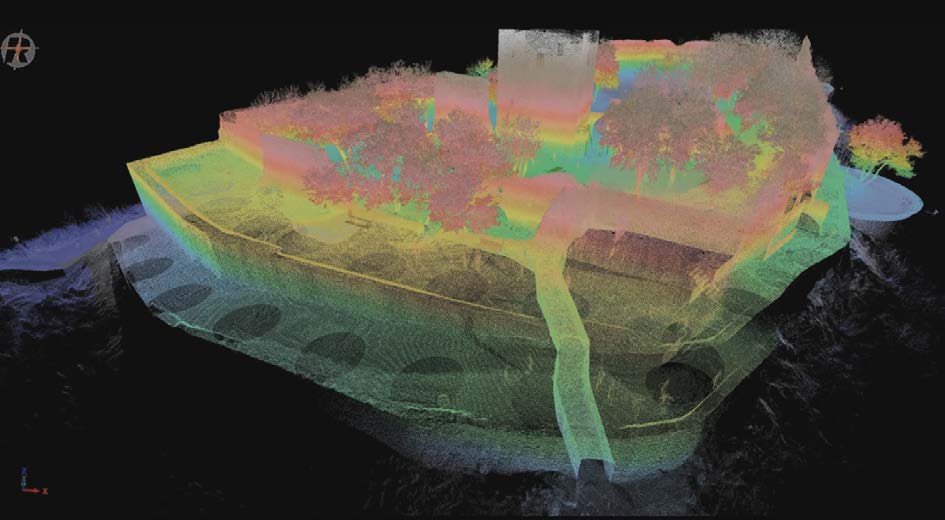
来自RIEGL的空载光达数据的示例:点云的颜色根据相对于地面的高度而定,包括所有的点。
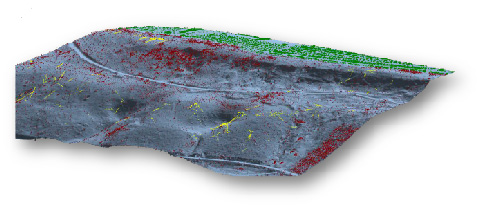
来自RIEGL的空载光达数据的示例:去除了植被中的点。数据分为地面点(灰色),枯木(黄色),低植被(红色和绿色)。
讯号处理电子技术的进步实现了Waveform-LiDAR仪器和系统的小型化。一个非常突出的例子是 RIEGL 于2014年推出VUX-1系列,该系列是特别设计于无人机(UAV)使用。它的设计小巧、坚固且小于3.5Kg, 提供Waveform-LiDAR的测量能力,测量速度高达1000 kHz。 2016年推出了更为紧凑的Waveform-LiDAR仪器,即 RIEGL miniVUX-1UAV(仅1.55Kg),这是最小的光达,可提供市场上测量级精度且特征丰富的点云。同年,推出了 RIEGL BDF-1,第一个小型测深光达,该设备可在小型无人机上安装操作。再者, RIEGL的 Waveform-LiDAR技术与先进的波形处理算法共同实现了在浅水中的测距,深度甚至超过了1.5倍沙氏盘深度(“Secchi Depth, 水能见度”)。
从左至右: RIEGL VUX-1UAV光达(相机选配), RIEGL miniVUX-1UAV(相机选配)和测深光达 RIEGL BDF-1。体积小巧轻便,可安装在无人机上进行数据采集。
所有RIEGL光达仪器皆提供的基于波形之反射率估计值,可以提高RIEGL地面光达数据自动拼接的性能和可靠性, 目前已使用于RIEGL VZ-400i,该项新功能可直接在仪器本身上运行, 于扫描现场进行站点拼接。
由于反射率估计值会产生目标本身无关距离的属性, 如不同物体对雷射波长的反射率, 来自不同位置和方向的扫描数据的相似性被有效地用于拼接。搭配集成的GNSS接收器,可以立即对扫描数据进行高精度地理地位(请参见下图)。
RIEGL VZ-400i 扫描180站后自动拼接之点云数据,包含有GNSS定位区域和无GNSS覆盖的区域(影像中央前方的隧道)。
上一页