
NEWS
最新消息
2021.05.26
机载透水光达测深 法国地中海沿岸的低空测量
RIEGL在法国地中海沿岸的过渡带环境中测试了其用于测量水下地形的透水光达之性能。最初计划使用无人机测量,但受限于新型冠状病毒疫情,最后使用固定翼飞机进行了测试,结果令人振奋。下一步将是在更具挑战性的海况下进行无人机操作。
机载透水光达(ALB, Airborne Laser Bathymetry)以其在无缝地测量混合地景中的效率而着称。因此,它被用于这些过渡地带的水文制图和海洋制图,并具有在一次任务中获取陆域地形和水域测深资料的优势。这些过渡地带通常包含多种多样的自然栖息地、人工构造物、沈积物或基础设施,很难只透过使用船载方式或陆上测量来完全覆盖。
由于海域和陆域的地形变化,它们具有很高的固有风险。这些变化必须严格监控。此类测量任务繁多,例如在洪水泛滥、土地萎缩或沿海侵蚀的地区之栖息地的保护。此外还用于基础设施维护和确保沿海航行安全。作为一种非侵入式测量方法,机载透水光达支持所有这些任务,而不会影响环境,也不会使测量人员面临风险。
光达于测深学Lidar in Bathymetry
测深学的特定要求和透水光达的局限性必需予以考虑。毕竟,我们谈论的是光和水,为求两者在相互作用时得到所有好处,这意味着光达技术中的损益比要达到精心的平衡。透水光达系统通常在载人飞机上使用,对地飞行高度超过1500英尺(457m)。他们使用绿色波长雷射,出于对眼睛安全的考虑,光束发散角通常大于1mrad,比纯地形光达系统中使用的近红外(IR)雷射要宽。最终在地面上产生的雷射足迹直径约为50cm。因而数据的平面分辨率受到限制。
浊度进一步限制了透水光达的可用性。浊度的粗略度量指标是采用沙奇深度,它是将白色或黑白相间圆盘,沈入水中量测其可见距离。透过使用能量强的雷射以及大型灵敏的接收器,有可能获取数倍沙奇盘深度(Secchi depth)的数据。但是,在浑浊的水中,这仍然意味着穿透性不佳。
当激光束与水相互作用时,它不仅由于被水吸收而散射和衰减,而且由于折射,其在空气与水界面处的传播方向和速度也发生了变化。欲校正折射影响需准确了解激光束撞击水面的位置,这可以经由对水面点进行分类并生成水面模型来确定。这些额外的处理步骤可能很耗时,并且需要有处理经验的团队。
低空透水光达
在过去的十年中,将无人机(微型或中型)作为相机和各种测量设备的载台的做法已经确立,并革命性地改变了测量领域。UAS(无人飞行系统)和高质量的微型传感器二者的使用,在视角、灵活性和细节程度方面实现了新的测量维度。基于这一经验,最近的研究和产业发展已开始将重点放在同样适用于水文学的传感器系统上。
毫无疑问地,使透水光达航高接近水面会限制扫描航带宽度,且受限的空速会进一步降低区域覆盖方面的整体效率,但这种规模的缩小会使得在空间分辨率和测深度性能方面的数据质量显着提高。人们对于复杂、小面积的河流地貌详细制图应用之期望尤其高,而高空透水光达却无法满足这些要求。
RIEGL在2016年推出了首款用于UAS整合的透水光达断面仪RIEGL BDF-1,随后在2018年推出了首款商用小型透水光达系统RIEGL VQ-840-G。该系统的核心部分是完全整合的紧凑型机载雷射扫描仪,同时用于地形和水深测量。该仪器可以搭配经过出厂率定的IMU / GNSS系统和整合完成的工业相机。它小巧轻便、重量仅为12kg,可以安装在各种平台上,包括无人机。
雷射扫描仪包括一部倍频红外雷射,以532nm的波长和50-200kHz的脉冲频率(PRR, Pulse Repetition Rate)发射具有大约1.5ns脉冲时间的脉冲。在接收器端,传入的回波讯号被转换为电子讯号,以接近每秒2G样本的数字化速率进行放大和数字化。VQ-840-G具有特殊的参数化功能,可以适应当前的测量情况。
一种选择是在1mrad和6mrad之间选择光束发散度,以在地面上保持恒定的能量密度,从而在人眼安全的操作与空间分辨率之间取得平衡。同样地,可以在3mrad和18mrad之间选择接收器的iFOV(瞬时视场)。对于地形测量和非常清澈或浅水的情况,较低的设置是合适的,而对于混浊的水,最好增加接收器的iFOV,以收集水体散射的大量光。
来自LITTO3D(红色点)和VQ-840-G(灰色为地形,蓝色为水面,绿色为海床)的光达资料迭加的剖面。我们观察到两种点云的完美匹配。(陡峭的坡度)差异可能表明两次采集运动之间的地形或植被发生了变化。广域透水光达(LITTO3D)在覆盖范围和深度穿透能力方面胜出,近水面透水光达(VQ-840-G)在复杂度和细节方面表现出色。
VQ-840-G使用Palmer扫描仪在地面上生成椭圆形扫描图案。因此,激光束以低入射角发射到水表面。
扫描时的距离测量是基于对数字化回波讯号进行实时波形处理的飞行时间(ToF)。实时侦测算法可识别数字化波形数据流中的潜在目标,并将相应的采样值馈送到讯号处理单元,该讯号处理单元能够以每秒高达250万个目标的速度实时执行系统响应拟合(SRF)。这些目标由距离、振幅、反射率和脉冲形状偏差的基本属性表示,并保存到储存设备中。除了用于目标侦测和实时波形处理之外,数字化的回波波形还可以储存起来,以用于后续的全波形分析。
在法国地中海沿岸测试系统
RIEGL将VQ-840-G安装在有人驾驶直升机和两种不同型号的电动多旋翼无人机上,对各种内陆水域进行了一系列成功的测试计划之后,于2021年3月在法国地中海沿岸,使用有人固定翼飞机进行了试验。
当前疫情状况影响了载台的选择。最初,该测试计划预定使用无人机测量,但是整个计划必须推迟到2020年后。由于人员旅行继续受到限制,我们发现我们的机组人员在空中状况更好。毕竟,这是一个很好的机会,可以在有人驾驶飞机上操作时评估系统的性能。此次使用塞斯纳T206H, OE-KRI进行任务,任务飞行高度为150m AGL,飞行速度为110kts,采用 50kHz发射频率,点密度约为每平方米6-8点,以实现最佳性能。
当然,有人驾驶的固定翼飞机的飞行动力学与无人机的机动敏捷性有很大不同。与典型的无人机飞行参数(例如75m AGL、 20-30kts航速)相比,点密度和性能有所降低,但这被有人机的灵活性和在短时间内扫描较大面积的可能性所抵消。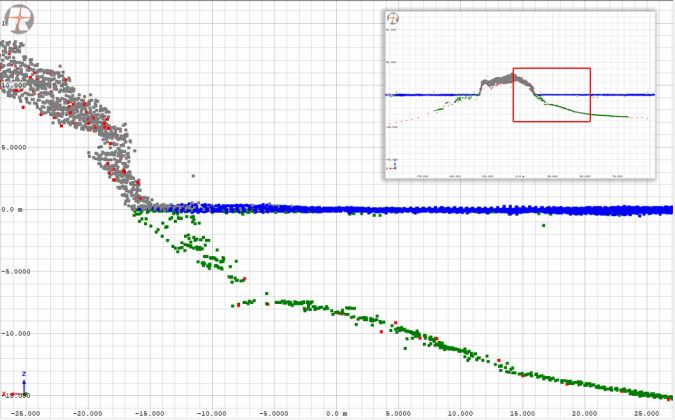
10:00后不久到达CapSicié,此时东风4级, 海象微弱。浪高达1至1.3m,东南方向有微弱长浪。
Cap Sicié是位于法国普罗旺斯地区的Toulon和La Seyne sur Mer海湾的悬崖。Cap Sicié之所以出名是因为与有遮挡的海湾地区相比,密陀风〔Mistral,法国南岸干冷北风〕和利凡风 (Levant, 地中海上强烈东风)特别强。其最高点为352m,可以欣赏到土伦湾(Toulon Bay)的全景,并且当空气特别清晰时,它可以晀望远至蔚蓝海岸群岛(Côte d’Azur)。在东边,一个引人注目的孪生岩层“ Les DeuxFrères”成为我们数据采集的重点。
将结果与参考数据进行比较
测试区域(约1152公顷)共飞行12个重迭航带,得到60,864,774个点。对于点密度检查,仅考虑来自单个航带的数据。对光达数据的首次分析显示: 地形部分提供了可靠的多回波覆盖,因此可以很好地穿透植被得到地形。测量区域中的海底由沙子组成,由于其颜色而提供良好的反射率,但在受到干扰时会造成水浑浊。
为了参考和验证结果,将数据与法国海军水文和海洋学局(SHOM)现有,可公开获得的透水光达数据进行了比较。在法国国家Litto3D计划中,已经生成了法国海岸沿海区离岸6海里范围内的10m等深线之数字测高参考模型。
短暂的法国海岸实地考察提供了对VQ-840-G在海上环境、安装在有人驾驶飞机时操作性能的了解。此次获得的成果是接受下一个挑战的动力,那就是要在无人驾驶飞机和较高的海况下操作。目前已计划进行一系列测试,以进一步针对不同的测量应用微调系统。
致谢
RIEGL非常感谢当地的空中交通管制服务部门,在德佩勒维斯特海军基地海军基地的飞行协调工作以及土伦地中海基地的建议。

机载透水光达(ALB, Airborne Laser Bathymetry)以其在无缝地测量混合地景中的效率而着称。因此,它被用于这些过渡地带的水文制图和海洋制图,并具有在一次任务中获取陆域地形和水域测深资料的优势。这些过渡地带通常包含多种多样的自然栖息地、人工构造物、沈积物或基础设施,很难只透过使用船载方式或陆上测量来完全覆盖。
由于海域和陆域的地形变化,它们具有很高的固有风险。这些变化必须严格监控。此类测量任务繁多,例如在洪水泛滥、土地萎缩或沿海侵蚀的地区之栖息地的保护。此外还用于基础设施维护和确保沿海航行安全。作为一种非侵入式测量方法,机载透水光达支持所有这些任务,而不会影响环境,也不会使测量人员面临风险。
光达于测深学Lidar in Bathymetry
测深学的特定要求和透水光达的局限性必需予以考虑。毕竟,我们谈论的是光和水,为求两者在相互作用时得到所有好处,这意味着光达技术中的损益比要达到精心的平衡。透水光达系统通常在载人飞机上使用,对地飞行高度超过1500英尺(457m)。他们使用绿色波长雷射,出于对眼睛安全的考虑,光束发散角通常大于1mrad,比纯地形光达系统中使用的近红外(IR)雷射要宽。最终在地面上产生的雷射足迹直径约为50cm。因而数据的平面分辨率受到限制。
浊度进一步限制了透水光达的可用性。浊度的粗略度量指标是采用沙奇深度,它是将白色或黑白相间圆盘,沈入水中量测其可见距离。透过使用能量强的雷射以及大型灵敏的接收器,有可能获取数倍沙奇盘深度(Secchi depth)的数据。但是,在浑浊的水中,这仍然意味着穿透性不佳。
当激光束与水相互作用时,它不仅由于被水吸收而散射和衰减,而且由于折射,其在空气与水界面处的传播方向和速度也发生了变化。欲校正折射影响需准确了解激光束撞击水面的位置,这可以经由对水面点进行分类并生成水面模型来确定。这些额外的处理步骤可能很耗时,并且需要有处理经验的团队。
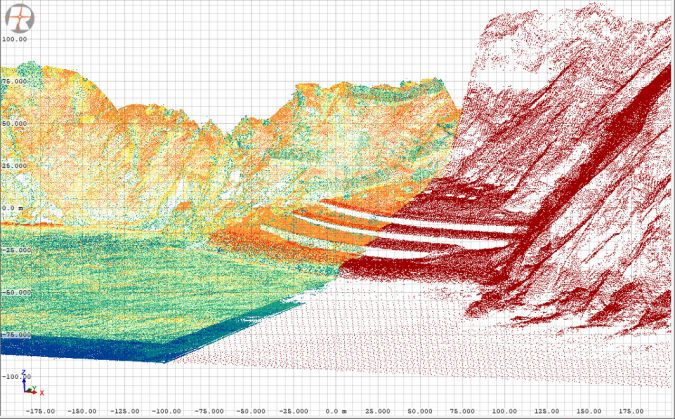
点密度的比较:红色点(右半图)是陆地和海底的LITTO3D数据(未显示水面数据),多色点是RIEGL VQ-840-G采集的资料(水面和海底)。
低空透水光达
在过去的十年中,将无人机(微型或中型)作为相机和各种测量设备的载台的做法已经确立,并革命性地改变了测量领域。UAS(无人飞行系统)和高质量的微型传感器二者的使用,在视角、灵活性和细节程度方面实现了新的测量维度。基于这一经验,最近的研究和产业发展已开始将重点放在同样适用于水文学的传感器系统上。
毫无疑问地,使透水光达航高接近水面会限制扫描航带宽度,且受限的空速会进一步降低区域覆盖方面的整体效率,但这种规模的缩小会使得在空间分辨率和测深度性能方面的数据质量显着提高。人们对于复杂、小面积的河流地貌详细制图应用之期望尤其高,而高空透水光达却无法满足这些要求。
RIEGL在2016年推出了首款用于UAS整合的透水光达断面仪RIEGL BDF-1,随后在2018年推出了首款商用小型透水光达系统RIEGL VQ-840-G。该系统的核心部分是完全整合的紧凑型机载雷射扫描仪,同时用于地形和水深测量。该仪器可以搭配经过出厂率定的IMU / GNSS系统和整合完成的工业相机。它小巧轻便、重量仅为12kg,可以安装在各种平台上,包括无人机。
雷射扫描仪包括一部倍频红外雷射,以532nm的波长和50-200kHz的脉冲频率(PRR, Pulse Repetition Rate)发射具有大约1.5ns脉冲时间的脉冲。在接收器端,传入的回波讯号被转换为电子讯号,以接近每秒2G样本的数字化速率进行放大和数字化。VQ-840-G具有特殊的参数化功能,可以适应当前的测量情况。
一种选择是在1mrad和6mrad之间选择光束发散度,以在地面上保持恒定的能量密度,从而在人眼安全的操作与空间分辨率之间取得平衡。同样地,可以在3mrad和18mrad之间选择接收器的iFOV(瞬时视场)。对于地形测量和非常清澈或浅水的情况,较低的设置是合适的,而对于混浊的水,最好增加接收器的iFOV,以收集水体散射的大量光。
来自LITTO3D(红色点)和VQ-840-G(灰色为地形,蓝色为水面,绿色为海床)的光达资料迭加的剖面。我们观察到两种点云的完美匹配。(陡峭的坡度)差异可能表明两次采集运动之间的地形或植被发生了变化。广域透水光达(LITTO3D)在覆盖范围和深度穿透能力方面胜出,近水面透水光达(VQ-840-G)在复杂度和细节方面表现出色。
VQ-840-G使用Palmer扫描仪在地面上生成椭圆形扫描图案。因此,激光束以低入射角发射到水表面。
扫描时的距离测量是基于对数字化回波讯号进行实时波形处理的飞行时间(ToF)。实时侦测算法可识别数字化波形数据流中的潜在目标,并将相应的采样值馈送到讯号处理单元,该讯号处理单元能够以每秒高达250万个目标的速度实时执行系统响应拟合(SRF)。这些目标由距离、振幅、反射率和脉冲形状偏差的基本属性表示,并保存到储存设备中。除了用于目标侦测和实时波形处理之外,数字化的回波波形还可以储存起来,以用于后续的全波形分析。
在法国地中海沿岸测试系统
RIEGL将VQ-840-G安装在有人驾驶直升机和两种不同型号的电动多旋翼无人机上,对各种内陆水域进行了一系列成功的测试计划之后,于2021年3月在法国地中海沿岸,使用有人固定翼飞机进行了试验。
当前疫情状况影响了载台的选择。最初,该测试计划预定使用无人机测量,但是整个计划必须推迟到2020年后。由于人员旅行继续受到限制,我们发现我们的机组人员在空中状况更好。毕竟,这是一个很好的机会,可以在有人驾驶飞机上操作时评估系统的性能。此次使用塞斯纳T206H, OE-KRI进行任务,任务飞行高度为150m AGL,飞行速度为110kts,采用 50kHz发射频率,点密度约为每平方米6-8点,以实现最佳性能。
当然,有人驾驶的固定翼飞机的飞行动力学与无人机的机动敏捷性有很大不同。与典型的无人机飞行参数(例如75m AGL、 20-30kts航速)相比,点密度和性能有所降低,但这被有人机的灵活性和在短时间内扫描较大面积的可能性所抵消。
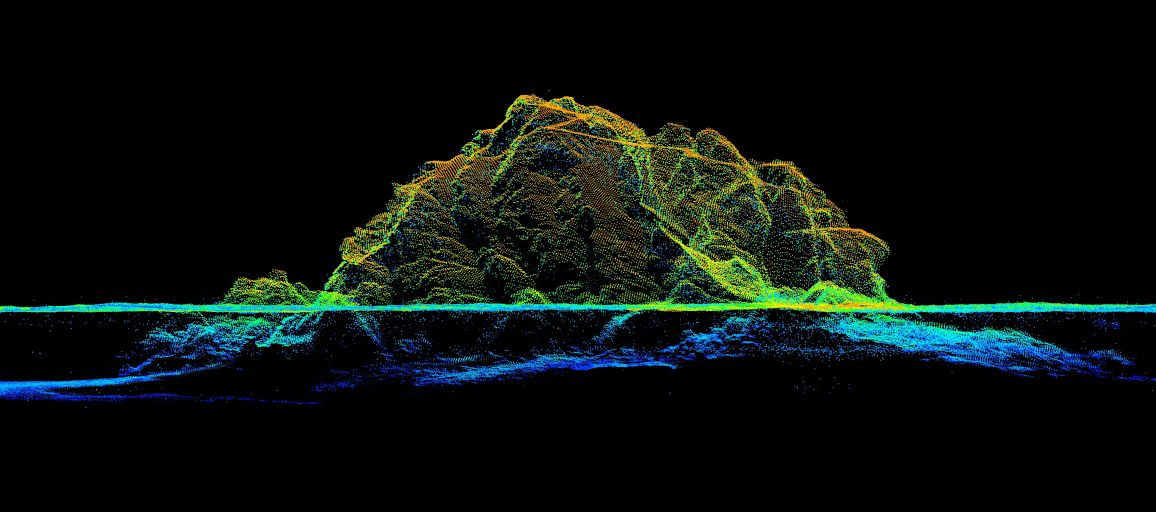
VQ-840-G高分辨率点云:Les DeuxFrères岩层和海底地形的视图,最大深度达到17.5m。
2021年3月2日,塞斯纳T206从亚维农-普罗旺斯机场(Avignon-Provence)起飞,在马赛以西的Camargue地区进行首次勘测,早晨的空气凉爽而平静。但是在西南更远的蒙彼利埃已经开始下雨,因此在飞行中必须取消另一个计划中的项目。OE-KRI机组人员决定继续在Cap Sicié的岩石地区进行试验前于亚维农加油,然后向法义边界前进以获取更多数据,并及时返回奥地利的本国飞机场。为了最大程度地减少机组人员Covid相关的风险,严格限制了地面作业。10:00后不久到达CapSicié,此时东风4级, 海象微弱。浪高达1至1.3m,东南方向有微弱长浪。
Cap Sicié是位于法国普罗旺斯地区的Toulon和La Seyne sur Mer海湾的悬崖。Cap Sicié之所以出名是因为与有遮挡的海湾地区相比,密陀风〔Mistral,法国南岸干冷北风〕和利凡风 (Levant, 地中海上强烈东风)特别强。其最高点为352m,可以欣赏到土伦湾(Toulon Bay)的全景,并且当空气特别清晰时,它可以晀望远至蔚蓝海岸群岛(Côte d’Azur)。在东边,一个引人注目的孪生岩层“ Les DeuxFrères”成为我们数据采集的重点。
CessnaT206 OE-KRI飞行于Cap Sicié
位于海角下方的Amphitria是一个废水处理厂,这是一个惊人的建筑结构,平滑地嵌入陡峭的海湾中。该建筑物暴露于水陆两种危险之中,因此要采取持续的安全措施,以确保为现场人员提供安全的工作空间。由于地形特征和对自然栖息地的保护,需要考虑减少接触性,此测试是非接触式但接近地面的测量方法的潜在用途之范例。将结果与参考数据进行比较
测试区域(约1152公顷)共飞行12个重迭航带,得到60,864,774个点。对于点密度检查,仅考虑来自单个航带的数据。对光达数据的首次分析显示: 地形部分提供了可靠的多回波覆盖,因此可以很好地穿透植被得到地形。测量区域中的海底由沙子组成,由于其颜色而提供良好的反射率,但在受到干扰时会造成水浑浊。
为了参考和验证结果,将数据与法国海军水文和海洋学局(SHOM)现有,可公开获得的透水光达数据进行了比较。在法国国家Litto3D计划中,已经生成了法国海岸沿海区离岸6海里范围内的10m等深线之数字测高参考模型。
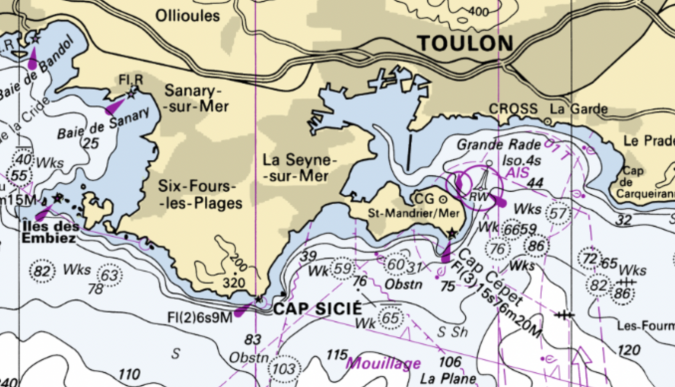
海洋面积图。(数据源:SHOM)
将获取的数据迭加到Litto3D数据上以获得两个数据集的视觉印象。我们很高兴能在地面和海底找到极佳的点云匹配。当Litto3D数据扩展到更大的深度时,VQ-840-G的数据由于其更高的空间分辨率而提供了更详细的视图。Litto3D数据点密度要求在海底为0.04 pts / m2,在地面上为1 pt / m2。我们调查的区域中,得到的结果比两者要求的点密度甚至更高。VQ-840-G在水面上方和下方提供的分辨率为7 pts / m2。因此,这些结果因此或可完美地补充广域调查数据中特别感兴趣的区域。短暂的法国海岸实地考察提供了对VQ-840-G在海上环境、安装在有人驾驶飞机时操作性能的了解。此次获得的成果是接受下一个挑战的动力,那就是要在无人驾驶飞机和较高的海况下操作。目前已计划进行一系列测试,以进一步针对不同的测量应用微调系统。
致谢
RIEGL非常感谢当地的空中交通管制服务部门,在德佩勒维斯特海军基地海军基地的飞行协调工作以及土伦地中海基地的建议。
从滨海拉塞恩(La Seyne sur Mer)的马尔维沃(Mar Vivo)海岸看的Les DeuxFrères。
原文出处作者: Ursula Riegl, Beatriz López García, Martin Pfennigbauer上一页